Il palloncino robot afferra con delicatezza anche gli oggetti molto pesanti
Un giorno i robot potranno maneggiare di tutto, persino frutta e verdura, senza fare danni. È la prospettiva che apre una nuova ricerca congiunta del Massachusetts Institute of Technology e dell’Università di Harvard. È stato creato il prototipo di un robot capace di afferrare e sollevare oggetti molto delicati, pesanti o ingombranti, di varie forme, con un unico attrezzo.
L’ostacolo da superare rispetto ai prodotti esistenti era quello di gestire differenti consistenze e forme, di peso variabile. Oggi i robot si servono di “mani” con forme ben stabilite, che permettono loro di afferrare oggetti pesanti, ma di una precisa dimensione. Funzionano in ambienti strutturati, per esempio nelle catene di montaggio. Per afferrare oggetti fragili, sono invece state implementate dita robotiche in materiali morbidi e flessibili, come la gomma. Vanno bene per gli oggetti delicati, ma solo di dimensioni e peso contenuti. Come unire le due “abilità” e gestire prodotti sia delicati sia resistenti, sia leggeri che pesanti?
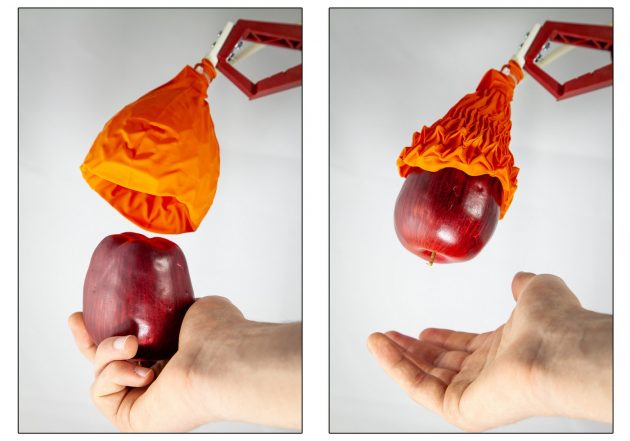
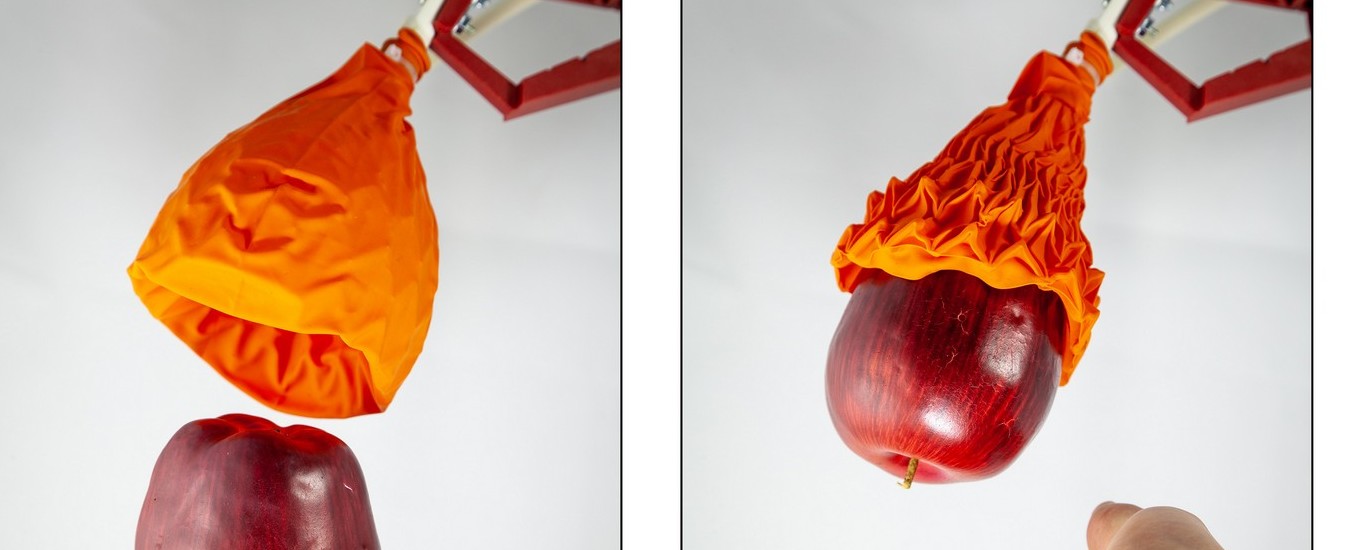
È qui che entra in gioco il progetto del MIT e dell’Università di Harvard. Come spesso capita, l’idea è stata presa in prestito da Madre Natura, e in particolare dalla pianta carnivora conosciuta come venere acchiappamosche o dionea. Nella versione robotica consiste in una struttura scheletrica simile agli origami. Quando deve afferrare un oggetto, la pinza a cui è collegata aspira l’aria, premettendo alla struttura di aderire attorno all’oggetto. A questo punto non è un problema sollevarlo.

Tecnicamente la struttura del “palloncino” è realizzata utilizzando uno stampo in gomma meccanica e una speciale plastica termoretraibile che si ripiega automaticamente. Il rivestimento esterno poi è banalmente un palloncino di gomma o uno strato di materiale tessile. Non serve modificare la presa a seconda dell’oggetto da sollevare, e non c’è rischio di danneggiarlo. Al contrario delle dita in gomma poi, può sollevare oggetti fino a 100 volte il suo peso.
Sono stati condotti test con lattine, martelli, bicchieri da vino, droni e persino un broccolo. Il robot attualmente funziona al meglio con oggetti cilindrici come bottiglie o lattine, per questo potrebbe essere impiegato un giorno nelle linee di produzione nelle fabbriche. La forma della pinza penalizza la capacità di afferrare oggetti di forma piatta, come per esempio i libri. Un ostacolo che i ricercatori sperano di risolvere in futuro, magari aggiungendo una visione computerizzata che suggerisca alla pinza come afferrare parti specifiche degli oggetti, in funzione dell’angolazione e dell’orientamento.