
I ricercatori del MIT hanno messo a punto RoboRaise, un braccio robotico capace di aiutare un essere umano nei lavori manuali, seguendo i suoi movimenti. Il concetto è quello della collaborazione, che le persone in carne e ossa fanno in maniera naturale. Basti pensare, ad esempio, a due persone che trasportano insieme un oggetto pesante e ingombrante come un tavolo o un divano: coordinano istintivamente i movimenti, ricalibrandosi costantemente per assicurarsi che le loro mani siano alla stessa altezza.
Per i robot fare una cosa del genere non è scontato, in genere svolgono solo i movimenti per i quali sono esplicitamente programmati. RoboRaise è differente: è un sistema capace di collaborare in maniera fluida per aiutare un operaio a sollevare oggetti, monitorando i suoi movimenti muscolari. Ci hanno lavorati i ricercatori del Computer Science and Artificial Intelligence Laboratory (CSAIL) del Massachusetts Institute of Technology, e l’hanno realizzato disponendo sensori elettromiografici (EMG) sui bicipiti e i tricipiti della persona da supportare. Gli algoritmi rilevano continuamente le modifiche che avvengono sul braccio della persona, oltre a piccoli gesti delle mani che l’utente potrebbe eseguire per un controllo motorio più preciso, e comandano al braccio robotico di agire di conseguenza.
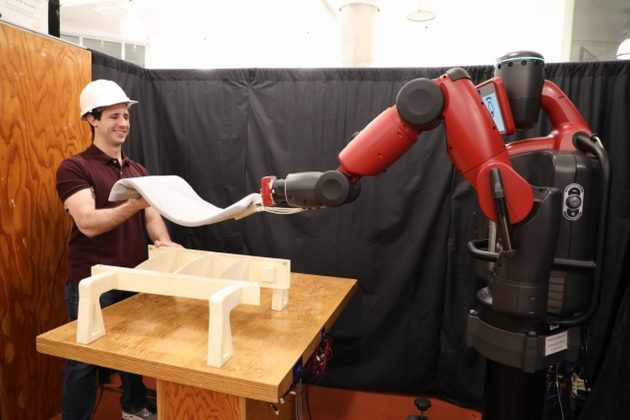
I test hanno chiamato in causa diverse attività che prevedevano la raccolta e il montaggio di componenti sia rigidi sia flessibili. 10 utenti diversi hanno lavorato insieme al robot e sono stati in grado di farsi aiutare a sollevare e movimentare gli oggetti. La precisione raggiunta è stata all’incirca del 70 percento.
L’idea è di sfruttare in futuro RoboRaise per aiutare le persone nella produzione in azienda e nelle costruzioni, oltre che come collaboratori domestici. I ricercatori spiegano che “l’approccio al sollevamento di oggetti con l’aiuto di un robot dev’essere intuitivo e simile a quello che farebbe una persona, ossia imitando i movimenti degli altri e apportando le giuste correzioni”. La chiave di tutto è “l’uso di segnali non verbali che codificano le istruzioni sul da farsi, per esempio per spostarsi un po’ più in alto o più in basso”, oltre alla capacità degli algoritmi di correggere in tempo reale i movimenti del robot in modo da ottenere un movimento continuo. È un esempio lampante di “interazione uomo-robot in cui il robot si adatta all’umano, anziché che il contrario. In questo modo il robot diventa uno strumento intelligente per supportare nel lavoro fisico”.
I segnali dei sensori elettromiografici sono l’ideale per capire come si muoverà un arto: non sono invasivi e non ostacolano i movimenti, funzionano anche in ambienti molto rumorosi o in cui è difficile osservare direttamente la persona cui il robot lavora. In più percepiscono la tensione e il rilassamento muscolare con una precisione sufficiente per stimare come si sta per spostare il braccio.
Il prossimo passo nella ricerca è aggiungere più sensori muscolari e altri tipi di sensori che consentano al braccio robotico di svolgere compiti ancora più complessi.



