Magneti e muscoli, ecco la mano robotica creata dal Sant’Anna di Pisa. Il paziente: “È stato come muovere di nuovo la mia”

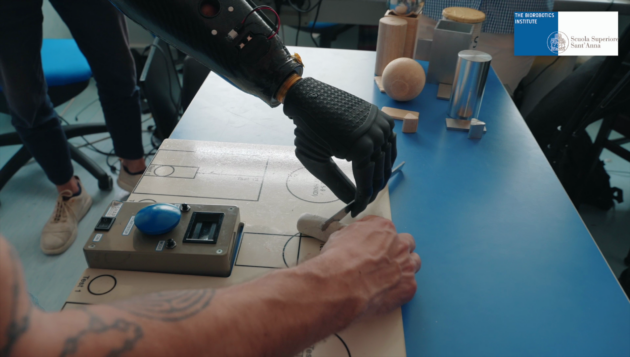
Nessun filo, nessuna connessione elettrica, solo magneti e muscoli che controllano i movimenti delle dita. Per Daniel, 34 anni, che ha indossato per sei settimane la prima protesi al mondo a controllo magnetico, è stato come ritornare a “muovere la propria mano”. Con l’innovativa protesi, capace di riprodurre i movimenti pensati da chi la indossa e di dosare la forza quando si afferra oggetti fragili, il giovane paziente è riuscito a compiere semplici azioni quotidiane, come aprire un barattolo, usare un cacciavite, raccogliere una monetina. Questo “miracolo” tecnologico è frutto dell’ingegno di un team di ricerca dell’Istituto di BioRobotica della Scuola Superiore Sant’Anna di Pisa, coordinato da Christian Cipriani.
I ricercatori hanno sviluppato un nuovissimo sistema di interfaccia tra il braccio residuo della persona amputata e la mano robotica. Il sistema prevede l’impianto di piccoli magneti nei muscoli dell’avambraccio, in grado di decodificare le intenzioni motorie. L’impianto, integrato alla mano robotica Mia-Hand, sviluppato dallo spin-off Prensilia, è stato sperimentale con successo su Daniel ei risultati sono stati pubblicati sulla rivista Science Robotics. “Questo risultato corona un percorso di ricerca lungo decenni”, commenta Christian Cipriani, professore ordinario presso l’Istituto di BioRobotica della Scuola Superiore Sant’Anna di Pisa. “Siamo finalmente riusciti a sviluppare una protesi funzionale alle esigenze di una persona che ha perso una mano”, aggiunge.
La frontiera esplorata dal team di ricerca della Scuola Superiore Sant’Anna è il controllo miocinetico, ovvero la decodifica delle intenzioni motorie attraverso magneti impiantabili nei muscoli. L’idea alla base della nuova interfaccia, sviluppata all’interno del progetto MYKI, finanziato dalla Commissione Europea tramite un ERC Starting Grant, è quella di usare dei piccoli magneti, delle dimensioni di qualche millimetro, da impiantare nei muscoli residui del braccio amputato e usare il movimento della contrazione per aprire e chiudere le dita. “Ci sono 20 muscoli nell’avambraccio e molti di questi controllano la mano”, spiega Cipriani. “Molte persone che perdono una mano continuano a sentirla come se fosse ancora al suo posto e i muscoli residui si muovono in risposta al comando che arriva dal cervello”, aggiunge. Il team di ricerca ha mappato i movimenti e li ha tradotti in segnali per controllare le dita della mano robotica. I magneti infatti sono dotati di un campo magnetico naturale che può essere tracciato nello spazio. Quando il muscolo si contrae, il magnete si muove e uno speciale algoritmo traduce questo cambiamento in un comando specifico per la mano robotica.










Daniel è entusiasta di essere stato il “paziente zero”. È stato scelto come volontario dello studio perché sentiva ancora la presenza della mano e i muscoli residui del suo braccio rispondevano alle intenzioni di movimento. Daniel ha perso la mano sinistra nel settembre del 2022. “Mi sono ritrovato all’improvviso senza una mano: un momento prima ce l’avevo e un momento dopo è completamente scomparsa”, racconta. La sua avventura con la nuova protesi è iniziata lo scorso aprile, quando è stato sottoposto a un intervento chirurgico per impiantare i magneti nel suo braccio. L’intervento è stato realizzato presso l’Azienda Ospedaliero-Universitaria Pisana (AOUP). “Una delle sfide più complesse – racconta Lorenzo Andreani dell’Unità operativa Ortopedia e Traumatologia 2 – è stata l’identificazione dei muscoli residui nella zona dell’amputazione, selezionati con precisione tramite le immagini della risonanza magnetica e dell’elettromiografia preoperatoria, anche se poi le condizioni effettive del tessuto a causa di cicatrizzazioni e fibrosi hanno richiesto un adattamento intraoperatorio”. Ma nonostante queste difficoltà i medici sono riusciti a completare l’impianto ea stabilire le connessioni. In totale sono stati impiantati sei magneti: per ciascuno di questi, si è dovuto localizzare e isolare il muscolo, posizionare il magnete e verificare che il campo dei magneti fosse indirizzato allo stesso modo.
Dopo una settimana di riposo per accertarsi che non ci fossero rigetti causa dall’operazione e poi Daniel ha potuto indossare e provare la mano robotica. “Per rendere più facile la connessione tra il braccio residuo dove sono stati impiantati i magneti e la mano robotica, abbiamo realizzato una invasatura protesica in fibra di carbonio che contiene il sistema elettronico in grado di localizzare lo spostamento dei magneti”, spiega Cipriani. I risultati della sperimentazione sono andati ben oltre le più rosee previsioni: Daniel è riuscito a controllare i movimenti delle dita, ha raccolto e spostato oggetti di forme diverse, ha compiuto classiche azioni quotidiane come aprire un barattolo, usare un cacciavite, tagliare con un coltello, chiudere una zip. È stato in grado di controllare la forza quando ha dovuto afferrare oggetti fragili. “Questo sistema mi ha permesso di recuperare sensazioni ed emozioni perdute: è stato come muovere di nuovo la propria mano”, racconta Daniel. La missione di questa grande collaborazione non è conclusa. “Siamo pronti a estendere questi risultati a una casistica più ampia di amputazioni”, conclude Cipriani.
Valentina Arcovio
Foto: Scuola Superiore Sant’Anna di Pisa